aktualizováno: 26.06.2023 11:26:19
První absolventi VVTŠ Liptovský Mikuláš (1973 - 1976)
|
AUTOMATIZOVANÉ SYSTÉMY VELENÍ PVO (PVOS, PVO PV) Tyto stránky tvořeny za vydatné pomoci a materiálu (s převzetím textů a obrázků) učitele v Technickém učilišti, VSOŠER a následně dlouholetého příslušníka velení vojska PVO PV ( LaMi-rotarepo)
Automatizované systémy velení a řízení palby PVOS
Od roku 1965 byl do výzbroje RTV postupně zasazován automatizovaný systém velení VOZDUCH V-1p, který urychlil předávání RL informace jednotlivým adresátům. Zavádění ASV do vojsk se nutně musela podřídit i organizační struktura PVOS. Proto byl vytvořen divizní systém.
Obrázek VOZDUCH V-1p
Radiotechnické roty byly vyzbrojeny objektem VP-02U, velitelská stanoviště radiotechnických praporů objektem VP-03U a naváděcí stanoviště objektem VP-11.
Obrázky VP-02U, VP-03U, VP-11
Velitelské stanoviště divize PVOS bylo vyzbrojeno objekty VP-04U. Objekt VP-04U umožňoval automatizovaný sběr radiolokační informace pro zabezpečení velení vojskům divize PVOS a předávání informací o vzdušné situaci do automatizovaných systémů velení PLRV ASURK-1 a pro automatizované navedení stíhacího letectva z objektu VP-11 Kaskád.
Obrázek VP-04U, VP-11 Kaskád
Velitelské stanoviště protiletadlové raketové brigády bylo vyzbrojeno automatizovaným systémem ASURK-1, který umožňoval automatizované řízení palby protiletadlových raketových oddílů na základě přebírání informací o vzdušné situaci od VP-04U
Obrázek ASURK-1
ASV, objekt ASURK-1 byl automatizovaným systémem velení protiletadlových raketových brigád a pluků. Prvotní informaci odebíral z objektu VP-02U a druhotnou informaci z objektu VP-03KS. Byl schopen řídit palbu protiletadlových raketových oddílů automatizovaně.
Začátkem 80. let byl do výzbroje RTV postupně zasazován automatizovaný systém velení další generace VOZDUCH VP - M, který nahrazoval systém VOZDUCH-1P. Systém byl vybaven jednoúčelovými počítači a umožňoval vedení bojové činnosti se zápisem do paměti.
Obrázek VOZDUCH-1M
Samostatné radiotechnické roty byly vyzbrojeny objektem VP-01M.
Velitelská stanoviště radiotechnických praporů s naváděcím stanovištěm objektem VP-02M a naváděcí stanoviště objektem VP-11.
Společná velitelská stanoviště radiotechnických praporů se stíhacím leteckým plukem, místní rota objektem VP-04M a pro sledování rušičů objektem VP-15, naváděcí stanoviště objektem VP-11.
Obrázek VP-01M, VP-02M, VP-11, VP-04M, VP-15
Velitelské stanoviště protiletadlové raketové brigády bylo vyzbrojeno modernějším systémem automatizovaného velení VEKTOR-1M a později SENĚŽ-1M.
Obrázek VEKTOR-1M,
 Tyto ASV byly zabezpečovány radiolokační informací z objektů VP-02M a PORI. Systém umožňoval i vyhodnocování poloh cílů - rušičů z objektů VP-15M.
Společná velitelská stanoviště radiotechnického vojska a protiletadlových brigád byla vyzbrojena, místní radiotechnická rota objektem VP-02U, radiotechnický prapor objektem PORI
Obrázek VP-02U, PORI
Velitelské stanoviště divize PVOS a radiotechnické brigády bylo vyzbrojeno objektem VS-11 a pro sledování rušičů objektem VS-15.
Obrázek VS-11, VS-15
Pro přenos informace mezi velitelským stanovištěm divize a velitelským stanovištěm PVOS sloužil nově zasazený automatizovaný systém velení ALMAZ.
Obrázek ALMAZ
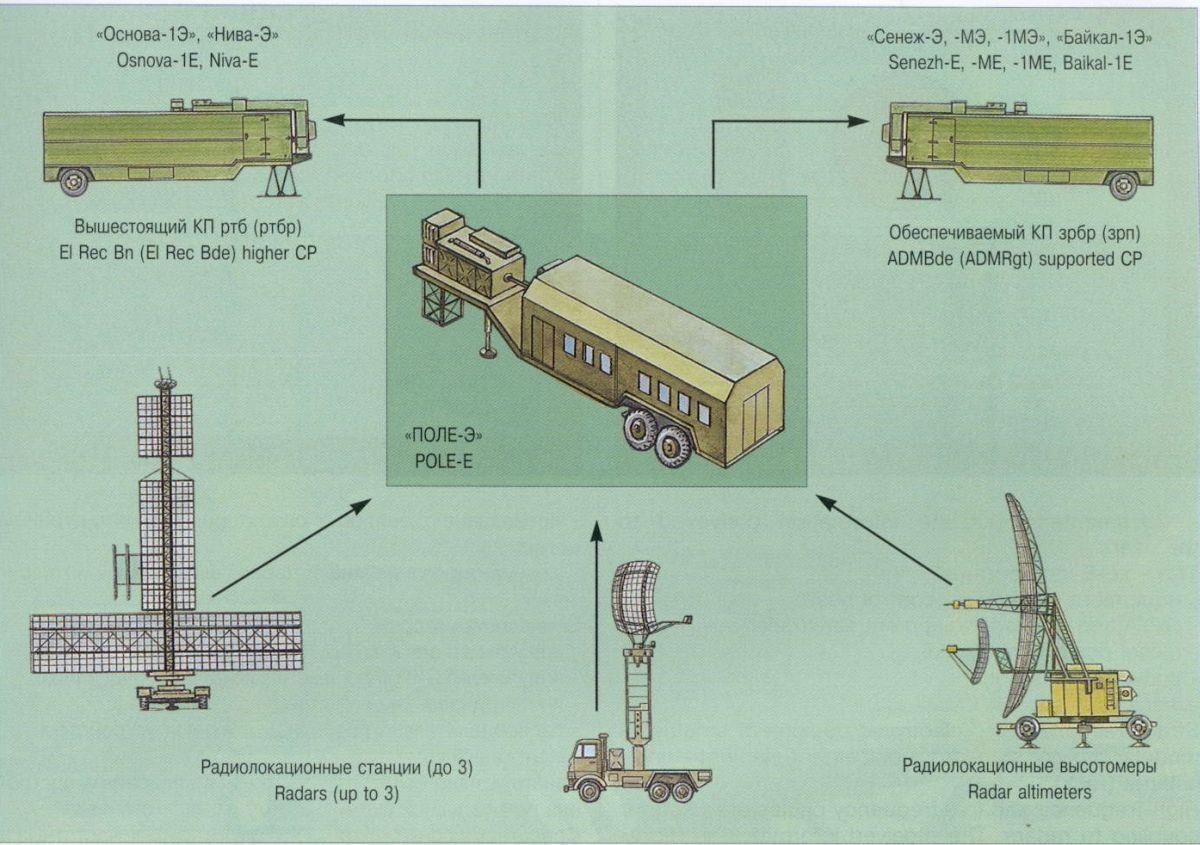
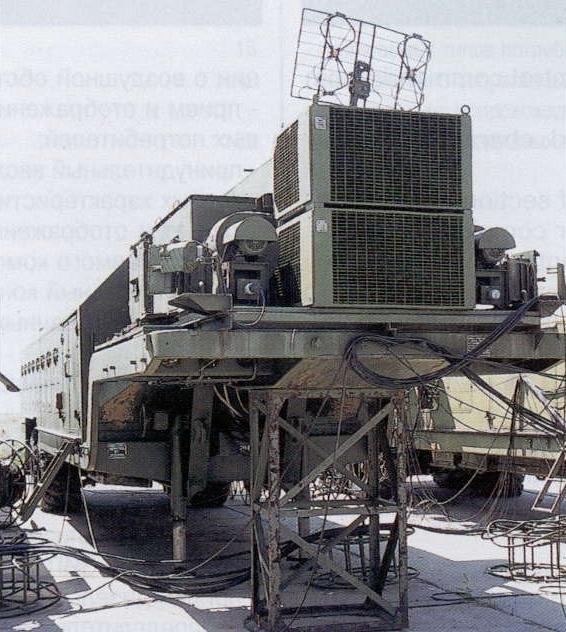
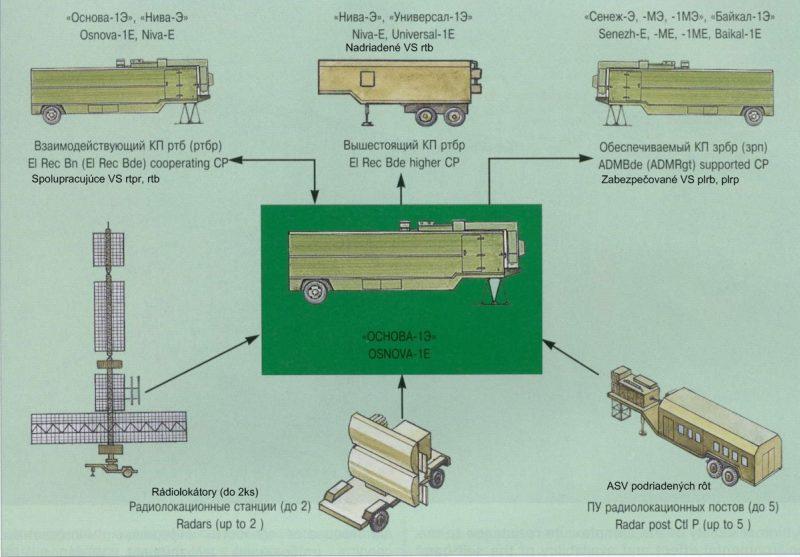
Koncem 80. let dochází k zasazování ASV další generace, systému OSNOVA-1E a POLE-E. Tento systém již zpracovával radiolokační informaci od 3D RL automaticky, byl schopen automaticky vyhodnotit odpálení proti-radiolokačních řízených střel. Systém však již nebyl dobudován, pracoval pouze pro systém SENĚŽ-1M.
Automatizovaný systém velení POLE-E byl určen pro automatizované velení radiotechnické jednotce. Umožňoval automatizované i automatické snímání, automatické zpracování a předávání RLI na nadřízené VS. Objekt umožňoval připojit 3 dálkoměry a 2 výškoměry.
     Automatizovaný systém velení OSNOVA-1E byl určen pro automatizaci velení uzlu zabezpečení aktivních prostředků. Umožňoval automatické snímání, zpracování a předávání RLI na nadřízené a zabezpečován velitelská stanoviště. Současně umožňoval velení vlastním RL a bojové směně. Objekt byl schopen automaticky vyhodnotit postřelování RL proti-radiolokační řízenou střelou a u ohroženého radiolokátoru vypnout vyzařování. Nevýhodou objektu byla vysoká energetická náročnost, jeho příkon dosahoval 100 kVA.
      V polovině 80. let vyvstal požadavek vybudování systému integrovaného velení. Na základě tohoto požadavku je vyvíjen od roku 1987 systém MASIV (Malý Automatizovaný Systém Integrovaného Velení) na bázi sítě personálních počítačů typu AT-286. Avšak požadavky na něj kladené nebyl schopen plnit, vývoj se opožďoval vinou nedostatků v řízení vývoje a systém morálně velmi rychle zastaral. Proto zasazen nikdy nebyl a počátkem 90. let bylo rozhodnuto jej přepracovat na automatizovaný informační systém - AIS.
V letech 1993 - 1994 byl zaveden do používání automatizovaný informační systém AIS. Byl vytvořen ze sítě počítačů řady PC-AT. Systém umožňoval pomocí počítačové sítě posílat jak celkovou informaci o vzdušné situaci, tak i odesílat různá hlášení ve formě tabulek a štábní dokumenty.
Od roku 1991 byl do výzbroje zaváděn integrovaný systém sběru, vyhodnocování a distribuce RL informace LETVIS (letecký vizuální informační systém) od soukromé firmy ALES, který měl nahradit používané ASV řady VOZDUCH, OSNOVA a POLE. Tento systém již pracoval na principu počítačových sítí a byl stavěn z počítačů řady PC-386 a PC-486.
LETVIS však pro řízení bojové činnosti PVO nevyhovoval a nebyl schopen plnohodnotně systémy ASV nahradit. Proto se průběžně pokračovalo na jeho zdokonalování. Konkurenční systém GATRACS, vyvinutý státním Výzkumným ústavem řízení letového provozu v Brně, se přes jeho podstatně vyšší přesnost nepodařilo v armádě prosadit.
Systém GATRACS, původně vyvinutý Výzkumným ústavem řízení letového provozu, přešel po zrušení výzkumného ústavu do majetku nově vzniklé firmy RADAS Brno. Tento systém pracuje na principu multiradarového zpracování radiolokační informace metodou multi-plot. Jeho základní filozofií je distribuce RL informace po sekundárním zpracování ve formě plotů (bodů) od jednotlivých zdrojů ke všem koncovým uživatelům. Terciární zpracování radiolokační informace se provádí pouze u koncového uživatele. Tím se dosahuje vyšší přesnost přenášené informace, jakož i její podstatně menší zpoždění. Celý systém je na jednom pracovišti integrován do dvou počítačů, z nichž jeden zabezpečuje komunikaci a terciární zpracování a druhý zobrazení. Systém vyhovuje požadavkům na řízení civilního letového provozu podle norem ICAO a EUROCONTROL.
V roce 1995 byly zrušeny ASV systému VOZDUCH - 1M i OSNOVA - POLE a byly nahrazeny systémem LETVIS, který byl koncem roku přepracován a upraven podle požadavků PVO. Tento systém byl zaveden na velitelská stanoviště radiotechnických brigád v konfiguraci SEKTOR-VS.
Do RL P-37, PRV-17, RL-42 a RL-4AS byly zabudovány extraktory, které měly nahradit práci operátorů. Systém LETVIS však zůstal stacionární, nebyl schopen vedení NLC a zůstal využitelný pouze pro použití v mírových podmínkách.
Automatizované systémy velení a řízení palby (ASVŘP) PVO PV
Od poloviny sedmdesátých let byly do výzbroje vojska PVO PV zaváděny systémy automatizovaného velení a řízení palby K-1 (9S44) KRAB. Tímto systémem byla vyzbrojena brigáda 2K11 KRUG a pluky 2K12 KUB. Součástí K-1 KRAB byla kabina bojového velení (KBV, rusky KBU) 9S416, která byla organicky začleněna u velitelských baterií brigády KRUG a pluku KUB.
 Protiletadlové raketové oddíly KRUG a baterie KUB byly vyzbrojeny kabinou příjmu navedení (KPN, rusky KPC) 9S417.
   Protiletadlová raketová brigáda KRUG měla jednu kabinu 9S416 a tři kabiny 9S417. Protiletadlový raketový pluk KUB měl jednu kabinu 9S416 a pět kabin 9S417.
Zdrojem radiolokační informace pro automatizované systémy velení a řízení palby K-1 KRAB byly radiolokační dálkoměry 1S12, 1RL128D, P-18, P-19 a radiolokační výškoměry PRV-9, PRV-16
Dalším automatizovaným systémem, který byl ve výzbroji vojska PVO PV bylo pojízdné velitelské stanoviště PU-12M (9S482M), které bylo určeno k automatizovanému velení a řízení palby jednotkám PVO na stupni vševojsková divize, protiletadlový raketový pluk OSA-AKM a protiletadlové jednotky vševojskových pluků.
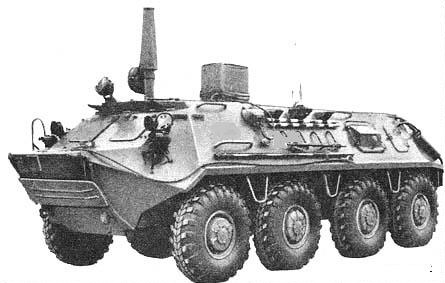      Bylo postaveno na bázi obrněného transportéru BTR-60PB bez výzbroje. Zdrojem radiolokační informace pro PU-12M byly radiolokační dálkoměry 1RL111D, 1RL128D, P-12, P-15, P-18, a P-19.
Velitelské stanoviště PU-12M bylo organicky začleněno na stupni náčelníka PVO vševojskové divize u čety radiolokačního průzkumu a velení, velitelské baterie a pěti protiletadlových raketových baterií protiletadlového raketového pluku, vyzbrojených protiletadlovými raketovými komplety 9K33M3 OSA-AKM (7 ks). Dále bylo zařazeno u náčelníka PVO vševojskového pluku, velitele protiletadlové raketodělostřelecké baterie a velitele protiletadlové raketové čety PLRK 9K35 (9K31). Sloužilo také k velení a řízení palby protiletadlových čet vševojskových praporů vyzbrojených přenosnými protiletadlovými raketovými komplety 9K32M STRELA-2M.
|
